AGV-роботы
автоматической транспортировки грузов











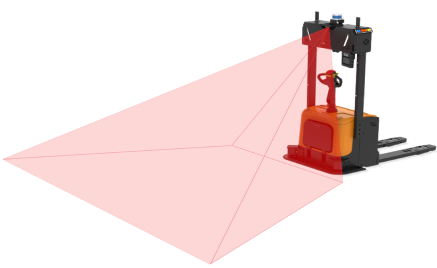
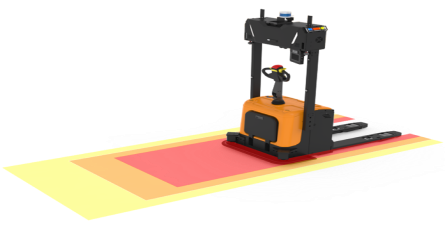
Робот оснащен алгоритмами интеллектуального взаимодействия с другим транспортом: маневрирование, снижение скорости, остановка. При движении робот использует поворотники для обозначения маневров.
Всем дорогам назначаются приоритеты. При выезде на дорогу с более высоким приоритетом робот пропускает движущийся по ней транспорт, и только потом проезжает сам. Каждая дорога для роботов может быть настроена индивидуально: доступны правосторонние, левосторонние дороги, дороги с движением по центру и дороги с односторонним движением.
Робот непрерывно отслеживает направление и скорость техники вокруг себя и в случае возможного пересечения траекторий снижает скорость. Пропустив технику, робот продолжает работу. Робот снижает скорость перед «слепыми» зонами. При встрече с другой техникой в узкой аллее робот может прижиматься к обочине, освобождая проезд.


- задание автоматически получено из WMS;
- задание создано вручную в веб-интерфейсе;
- циклические операции (возможны варианты настроек).

- перевезены все паллеты (количество определено изначально);
- перевезены все обнаруженные роботом паллеты в заданной зоне;
- циклическое задание может выполняться по времени, количеству паллет или иным правилам.



Роботы умеют в движении автоматически определять наличие паллет в ячейках буфера и подъезжают сразу к ним, не тратя времени на пустые ячейки.
Роботы умеют захватывать и перевозить паллеты различных размеров (EUR, FIN, а также иные стандартные и нестандартные паллеты) и материалов: деревянные, пластиковые, металлические.
При взятии паллеты робот определяет ее положение и строит точную траекторию, что позволяет захватывать паллеты, стоящие с небольшим сдвигом или под углом.
В случае, если робот в процессе обнаружения положения паллеты не может получить подтверждение того, что перед ним находится целая, правильно ориентированная паллета, то робот не будет её захватывать для безопасности людей. Примеры ситуаций, в которых робот не будет захватывать паллету:
- отсутствует боковая ножка паллеты;
- сильное отклонение габаритов паллеты от заданных;
- значительный сдвиг или поворот паллеты;
- работа с конвейерами и стеллажами.